Simulation foundations
As an agent-based simulator, METS-R SIM consists of mainly two types
of classes: the agent named by the component (e.g., Vehicle, Lane,
Junction) and the container of a group of agents, named by
[agent_class]Context as shown in the following figure. The
simulation starts by initializing a ContextCreator, in which the
subContexts are built. For the components (e.g., Zone, Road, Signal)
that need to be updated over time, a step function is provided.
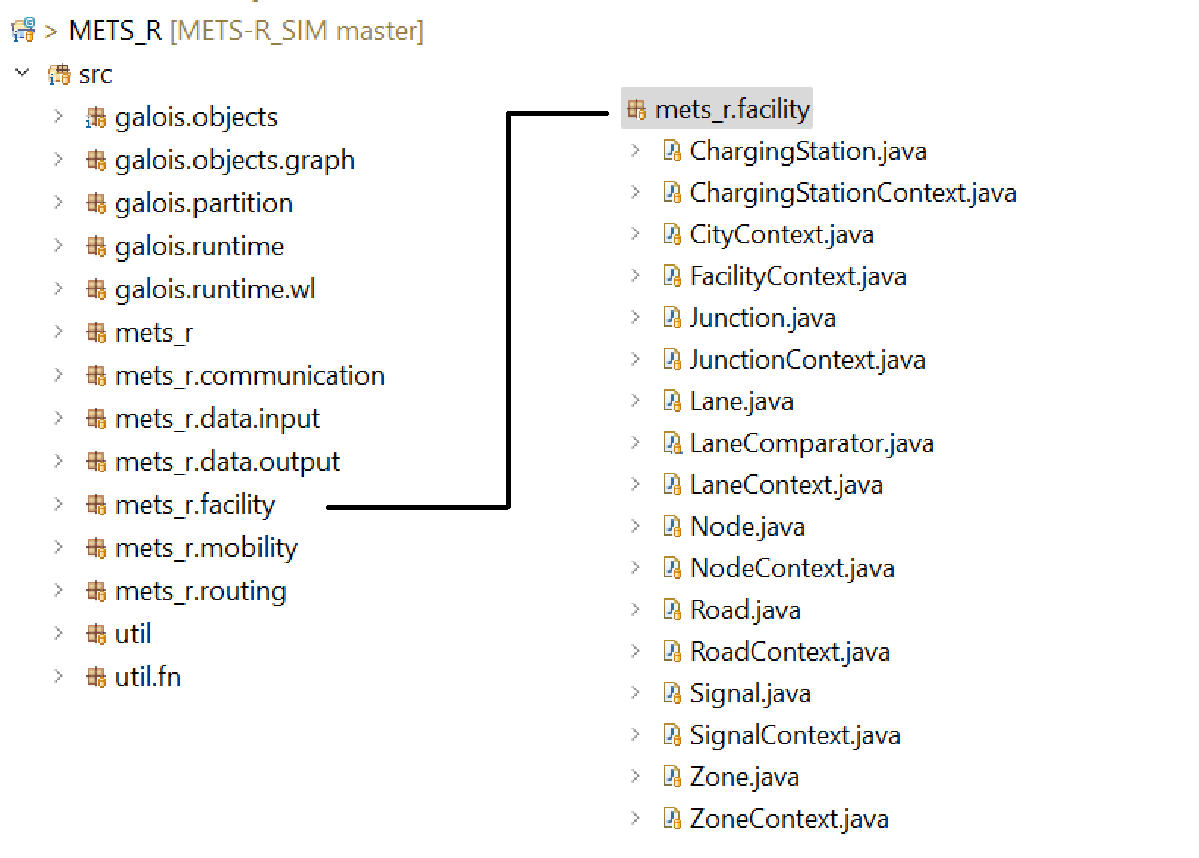
Simulation source files
EV charging module
In mets_r.facility.ChargingStation, we implemented the charging
station class for the first come first serve charging services, which
contains the queue structure: both the Level 2 (L2) and Level 3 (L3)
charging queues are considered. In general, L3 charging is faster than
L2 charging, and they are both adopted in current electric vehicle
operation. Each charging station receives the electric vehicles and
joins these vehicles into the corresponding charging queues based on the
calculated utility.
For electric vehicles inherited from
mets_r.mobility.ElectricVehicle, their searching strategy of the
charging station is defined in the goCharging function. For EV taxis
and EV buses, they would reroute to the closest charging station to
charge themselves. After finishing the charging, finishCharging will
be called to load the latest trip schedule.
Ride-hailing operation module
A zonal-level ride-hailing service is implemented in
mets_r.facility.Zone and mets_r.mobility.ElectricTaxi. Within
each zone, the passengers/vehicles matched using a
first-come-first-serve queue. Ridesharing can be toggled on
(RH_DEMAND_SHARABLE=true) so requests with the same
origin/destination zones to be served in one trip. In addition, bus-taxi
integration (COLLABORATIVE_EV=true) can be turned on so that one
trip can be divided into bus and taxi subtrips.
Vehicle repositioning is implemented in mets_r.facility.Zone to
balance the trip demand and vehicle supply. Zones with deficient vehicle
supply will ask for vehicles from the surrounding zones. While not
repositioning, empty vehicles will perform random walks within the
neighboring link of the current zones, if a vehicle has been cruising
for more than a specific period (e.g., 10 minutes), it will be routed to
the closest zone with available parking space.
Bus operation module
Each bus defined in mets_r.mobility.ElectricBus travels on the loop
route with one terminal station (the first element in the station
sequence) and several intermediate bus stops. If loaded beforehand, the
bus schedules are stored in mets_r.input.BusSchedule. One can alter
the entire bus schedules in the synchronized mode by sending messages to
trigger the scheduleBus function in
mets_r.commnication.ControlMessageHandler.
Passenger module
The passenger module describes the decision-making process of requests
while traveling to and from the transportation hubs. The module consists
of five components: trip generation, time/cost-based split model,
queuing structure, passenger departure as well as bus/taxi departure.
This process is defined in mets_r.facility.Zone using the concept of
trip requests (mets_r.mobility.Request) and activity plans
(mets_r.mobility.Plan). The implemented passenger activity module in
our simulator is described in the figure below.
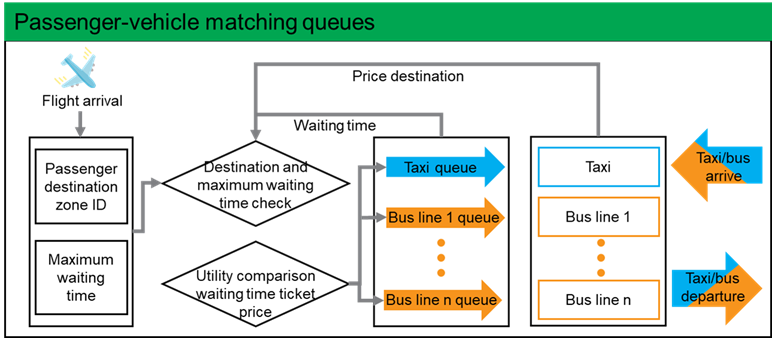
Passenger module
Car following and lane-changing module
The car following and lane-changing module is based on the previous
A-RESCUE simulator. A-RESCUE is an agent-based road traffic simulator
designed for simulating hurricane evacuation
(https://github.com/umnilab/A_RESCUE). It adopts a three-regime car
following model originally seen in MITSIM. We added modifications based
on the intelligent driver model (IDM). The lane-changing model comes
from an early study,
which consists of a probabilistic model for lane-changing decisions and
a heuristic model for forced lane-changing behaviors. These are
implemented in the mets_r.facility.Road and
mets_r.mobility.Vehicle.
Energy calculation module
For gasoline vehicles, there were several well-developed and documented
methods such as MOVES proposed by the Energy and Environmental
Protection Agency. This method described vehicle gas consumption and
emissions based on VSP (vehicle-specific power), velocity, and
acceleration. For the case of EVs, there was no unified process that
describes the energy consumption as a function of their VSP and
velocity. We decided to focus on a 2016 physics-based
model
developed by Fiori et al., which can capture the impact of different
vehicle characteristics, acting forces, and vehicle dynamics. The
default parameters, defined in mets_r.mobility.ElectricVehicle, are
extracted from Nissan Leaf, which is one of the most used vehicle types
in the literature at that time.
Vehicle routing module
Vehicle routing is implemented in mets_r.routing, which is a very
important element in a traffic simulator. In METS-R SIM, we adopt a
model close to modern routing engines. Specifically, each
mets_r.facility.Road instance will record the vehicles’ time spent
on each link to regularly update the estimations of link travel time.
The estimated travel time will be used to calculate the shortest path
between two nodes in the network. Besides this, one can override this
routing mechanism by sending messages to trigger function
routingTaxi or routingBus in
mets_r.commnication.ControlMessageHandler.